At The Sexton Corporation, we specialize in custom design and engineering solutions, guiding clients through every stage of the process—from conceptualization to assembly—to deliver innovative, high-quality products tailored to their specific needs. Whether you need a one-of-a-kind prototype or full-scale production, our team is committed to turning your vision into reality.
Contact us today!
Controlled Quality
-

Consultation & Design
Our approach begins with concept development and feasibility analysis, where we collaborate to define goals and assess technical requirements.
-
Engineering & Development
Using modeling, rapid prototyping, and custom fabrication, we refine and optimize designs to ensure superior functionality, durability, and performance.
-

In-House Manufacturing
Our in-house manufacturing where we are able to deliver high-precision machining through our team of machinists. They ensure that every component meets standards of accuracy and quality.
-

Assembly & Testing
Rigorous testing and optimization, we validate each design for reliability and compliance with industry standards before moving into final assembly and production.




Custom Engineering & Development Project Highlights

E2X4 - 290 Degree Synchronized Cinematic Capture
Developed initially to film marine archaeological discoveries in Egypt, the E2X4 is a modular underwater cinema system built for extreme environments and immersive storytelling. Housing four Z-Cam E2 cameras, it captures synchronized 16K video for up to four hours, with flexible mounting options—diver-driven sled, scooters, or tripod—and features a 5" 4K LED control screen and button deck for intuitive underwater operation.
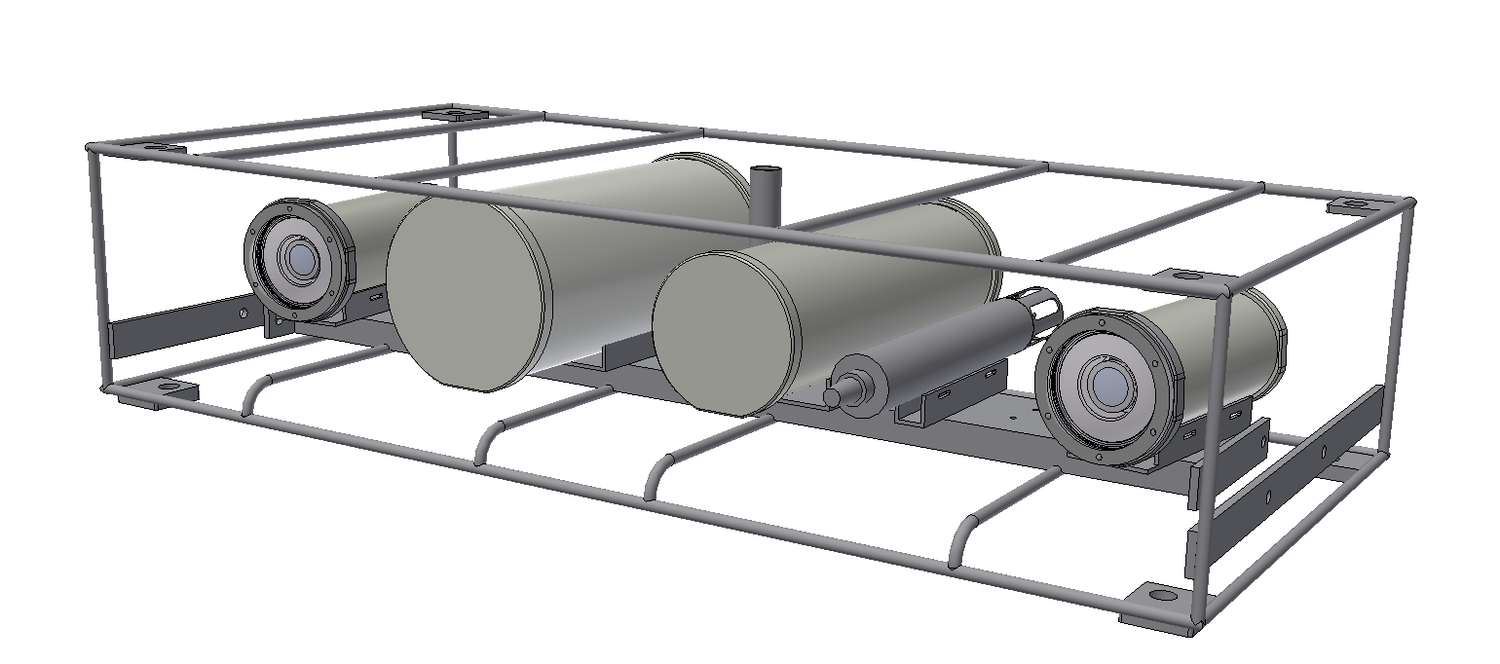
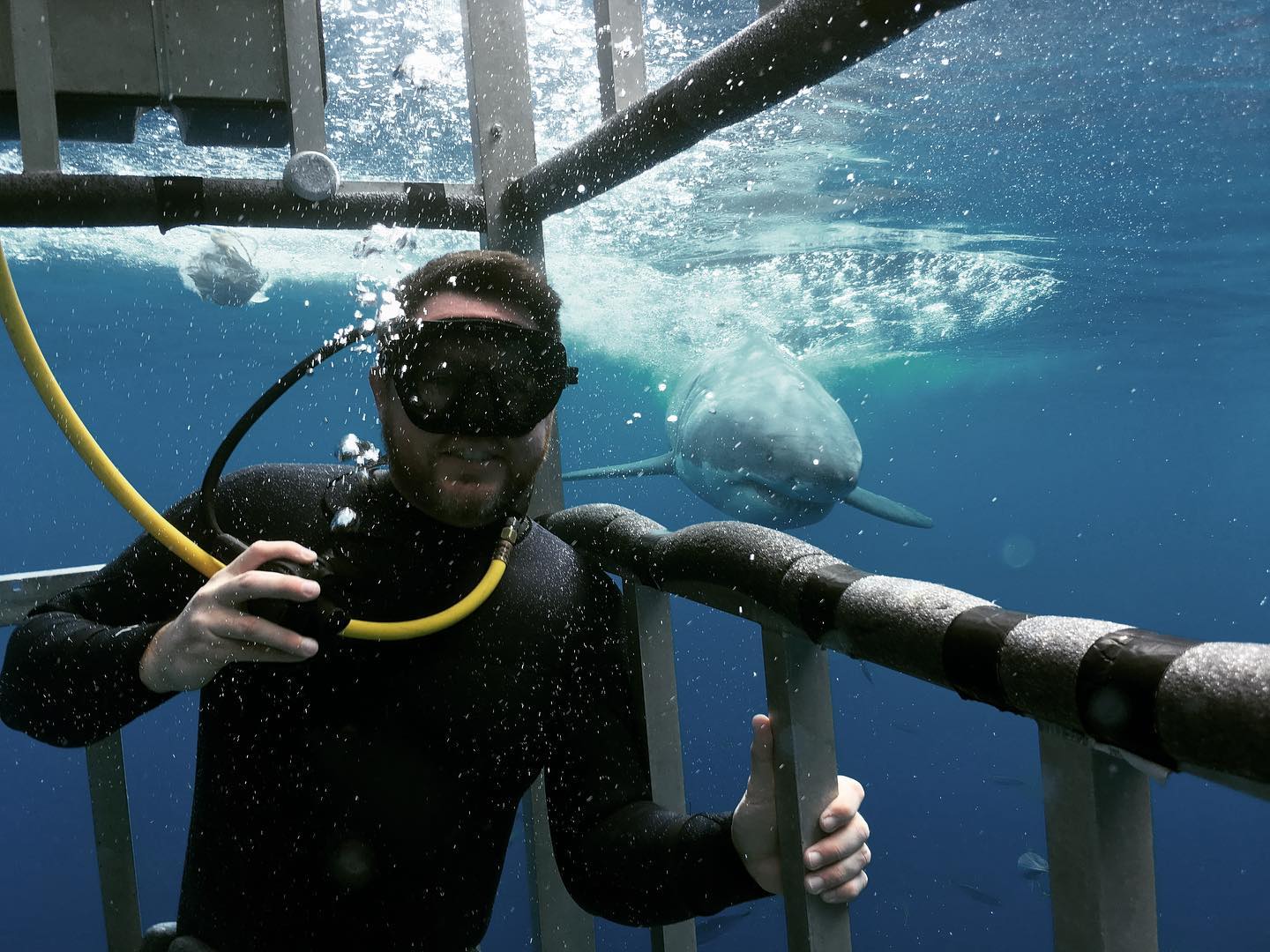
MOUSS - Modular Optical Underwater Survey System
The Modular Optical Underwater Survey System (MOUSS) is a cost-effective, 500 m-rated stereo-video camera system used in Hawaii, the Gulf of Mexico, and Southern California for fisheries research, enabling identification, counting, and sizing of individuals from 0.5–10 m—even at 250 m depth using ambient light. Its modular design supports various imaging sensors, power systems, and deployment platforms, making it a versatile tool for efficient survey design, calibration, and analysis.
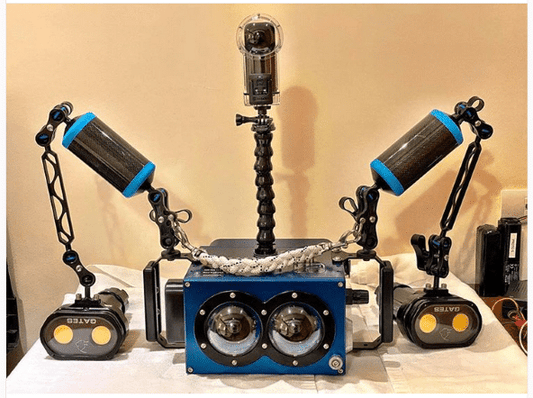
TriCam- 3D Photogrammetric Imaging System
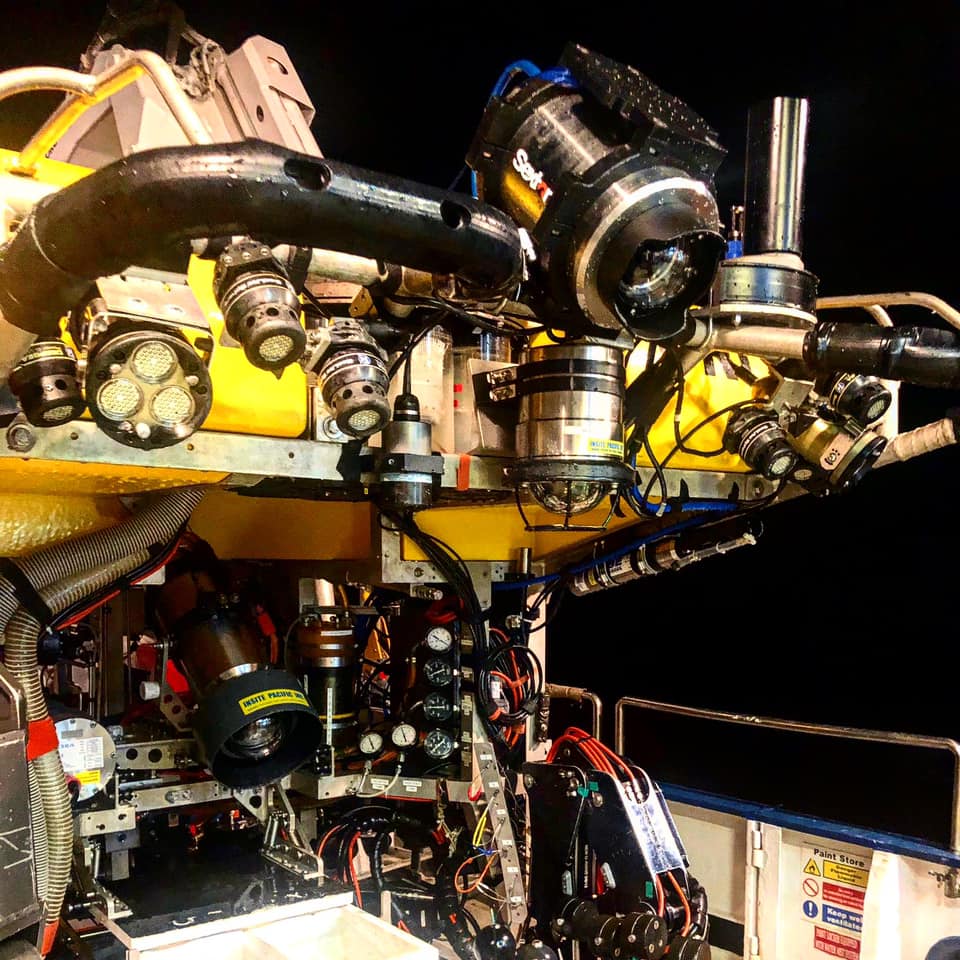
High-resolution imagery and immersive hemispherical video captured with the Widefield Camera Array—aka “TriClops”—a cutting-edge 3-camera system developed by Ocean Exploration Trust and The Sexton Corporation with support from the Office of Naval Research. Designed for 3-dimensional photogrammetric models, virtual reality, and IMAX-quality cinematographic productions, this genlocked E2-F6 cinema camera array delivers synchronized, wide field-of-view imaging at 60fps using 24-megapixel full-frame sensors.
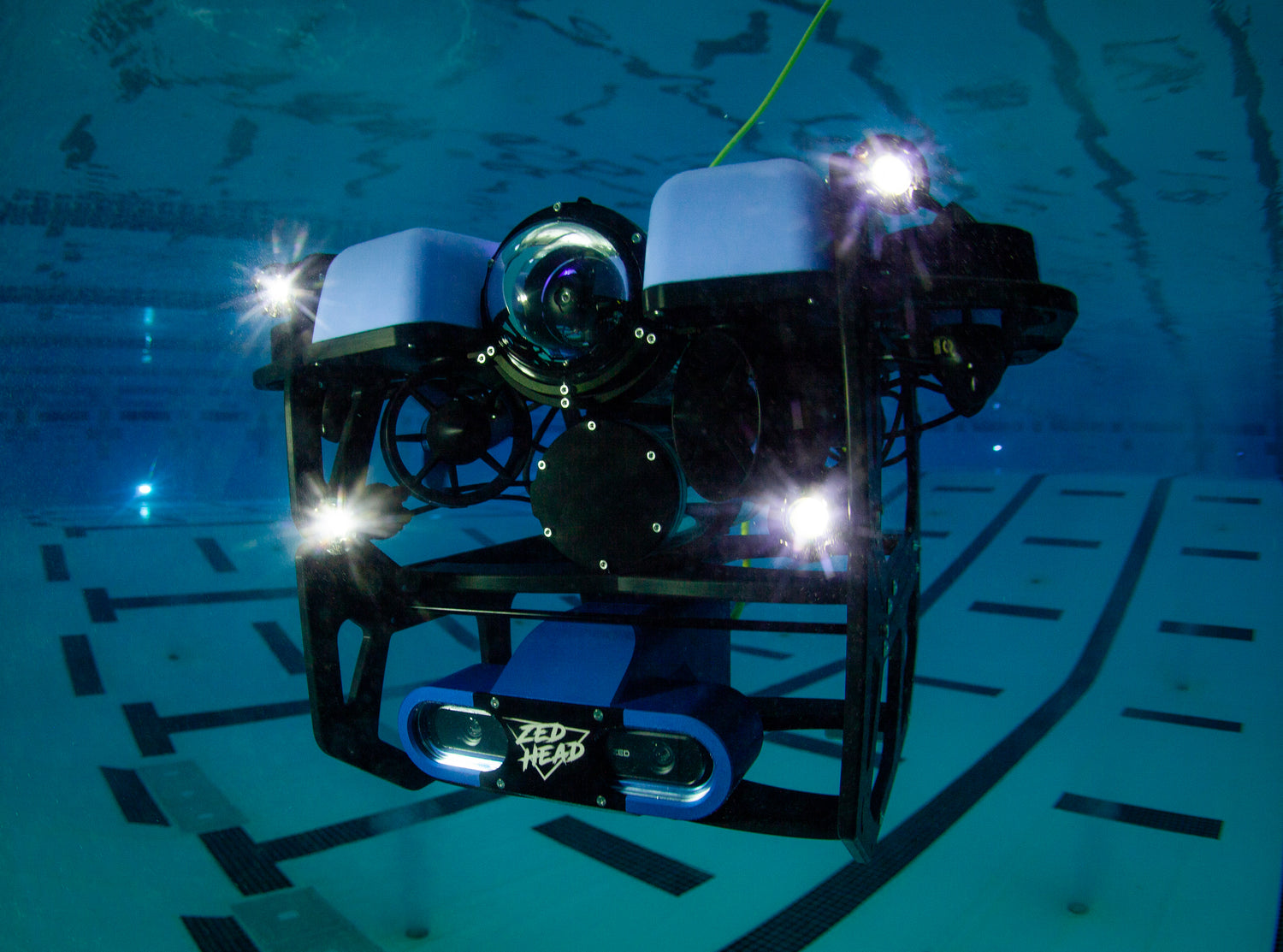
ZedHead - ROV Integrated Underwater Mapping & 3D Modeling System
Sexton’s ZedHead is a compact underwater spatial mapping and 3D rendering system that integrates the StereoLabs Zed 2i camera and Zed Box in an anodized aluminum housing. Designed for inspection-class ROVs like the BlueROV2 and VideoRay Defender, it generates point cloud models and accurate depth measurements in areas too small for sonar. Powered by the ORIN NX 8GB and StereoLabs software, ZedHead supports real-time video streaming, depth sensing, spatial object detection, and 3D mapping through a 10-100th Ethernet connection to the surface.
Explore More Custom Projects
-

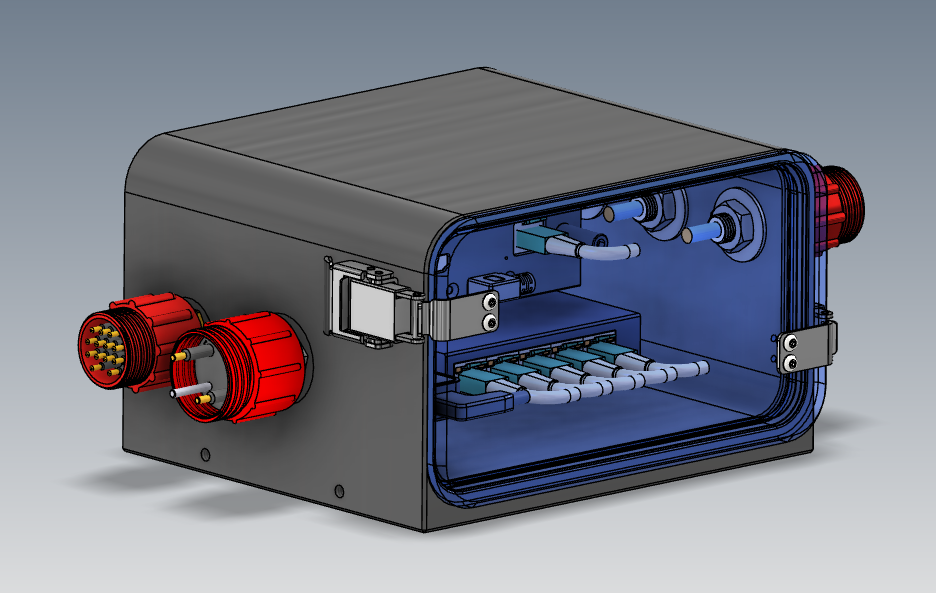
(2018) S.C.I.N.I. Power Converter
Custom power supply enclosure for a long range tethered ROV known as the...
1 min read -

(2019) Blackfin
Designed around the Red Komodo 6K Camera and a Canon 15-35 Lens. This housing was fitted with external...
1 min read -

-

(2021) USGS Diver Survey Scooter
Contracted by the USGS, the personal diving survey tool incorporates many technologies...
1 min read -
-

(2019) Mobius Trawl
This custom design for NOAA incorporates battery power, white and far-red LED...
1 min read -

-