Load video:
Cutting-Edge Oceanographic Research Technology & Custom Instrumentation Solutions
Advance your marine and environmental science with precision-engineered oceanographic instrumentation. We specialize in designing, developing, and supplying high-performance tools for oceanographers, marine biologists, and environmental researchers who demand accuracy, reliability, and innovation in their fieldwork. Our technology is built for scientists by scientists, with deep expertise in ocean monitoring, physical and biological sensing, and custom data acquisition systems. Whether you're outfitting your next research cruise, building a new monitoring array, or seeking a custom solution for a complex aquatic challenge, we partner with you to ensure your instruments are optimized for success.
Explore our full suite of oceanographic tools or get in touch for a consultation on your next project.
Oceanographic Technology Services
-

Waterproof Enclosures
Transform your off-the-shelf oceanographic instruments into submersible, field-ready tools with our custom waterproofing service—built for reliability in harsh marine environments. We specialize in protecting a wide range of devices, including spectroradiometers, radiation detectors, RFID readers, XRF analyzers, ultrasonic thickness gauges, CTDs, and more.
-

Custom Technologies
Partner with us to design and build custom, field-deployable oceanographic research solutions tailored to your unique scientific needs and environmental conditions. From novel sensor integrations to entirely new devices, we specialize in developing non-existing technologies including custom imaging systems, hybrid CTD-sampler arrays, autonomous sensor nodes, and AI-enabled underwater platforms.
-

Proposal Development
We offer expert proposal development services to support your oceanographic research goals with detailed pricing, technical consultation, and professional writing. Whether you're seeking funding for new instrumentation, field campaigns, or collaborative technology projects, we help craft compelling, competitive proposals grounded in scientific and engineering expertise.



Sexton Oceanographic Technology
-
Marine Sensor Technology
Sexton-DO Series—a high-performance marine sensor array measuring pressure, dissolved oxygen, temperature, and salinity with automatic WiFi upload to onboard deck boxes.
-

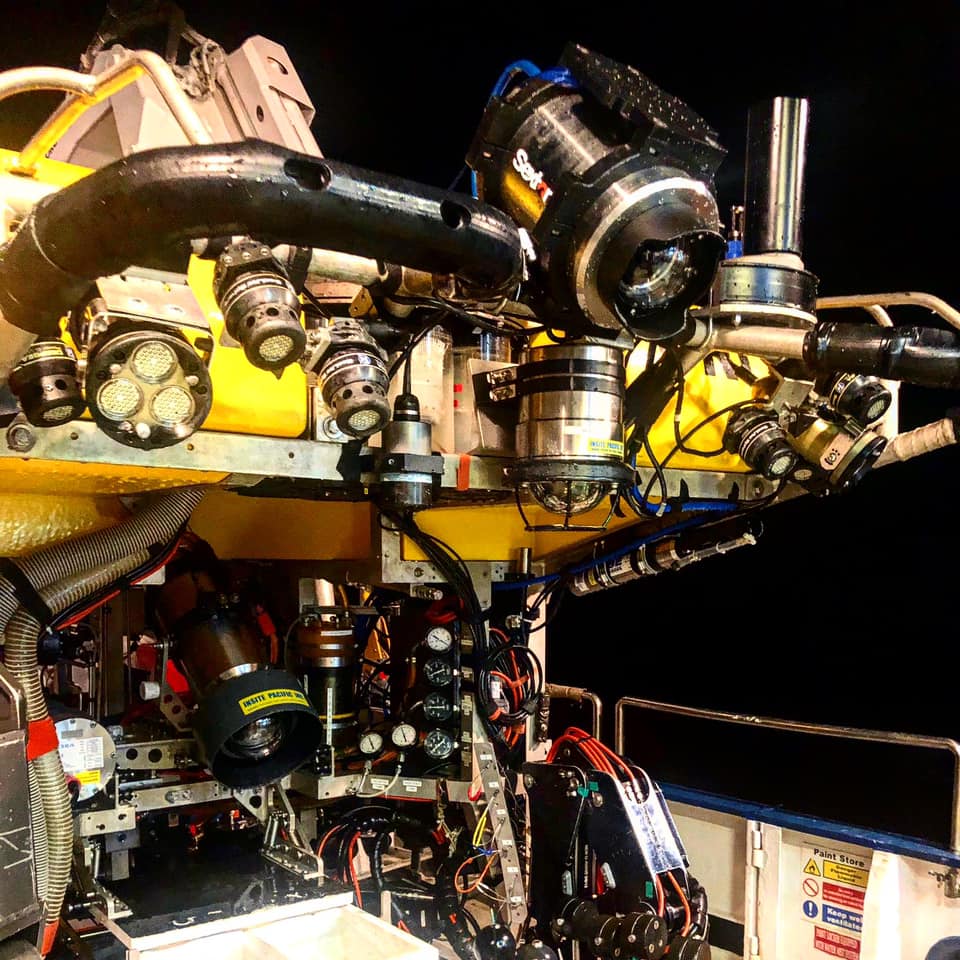
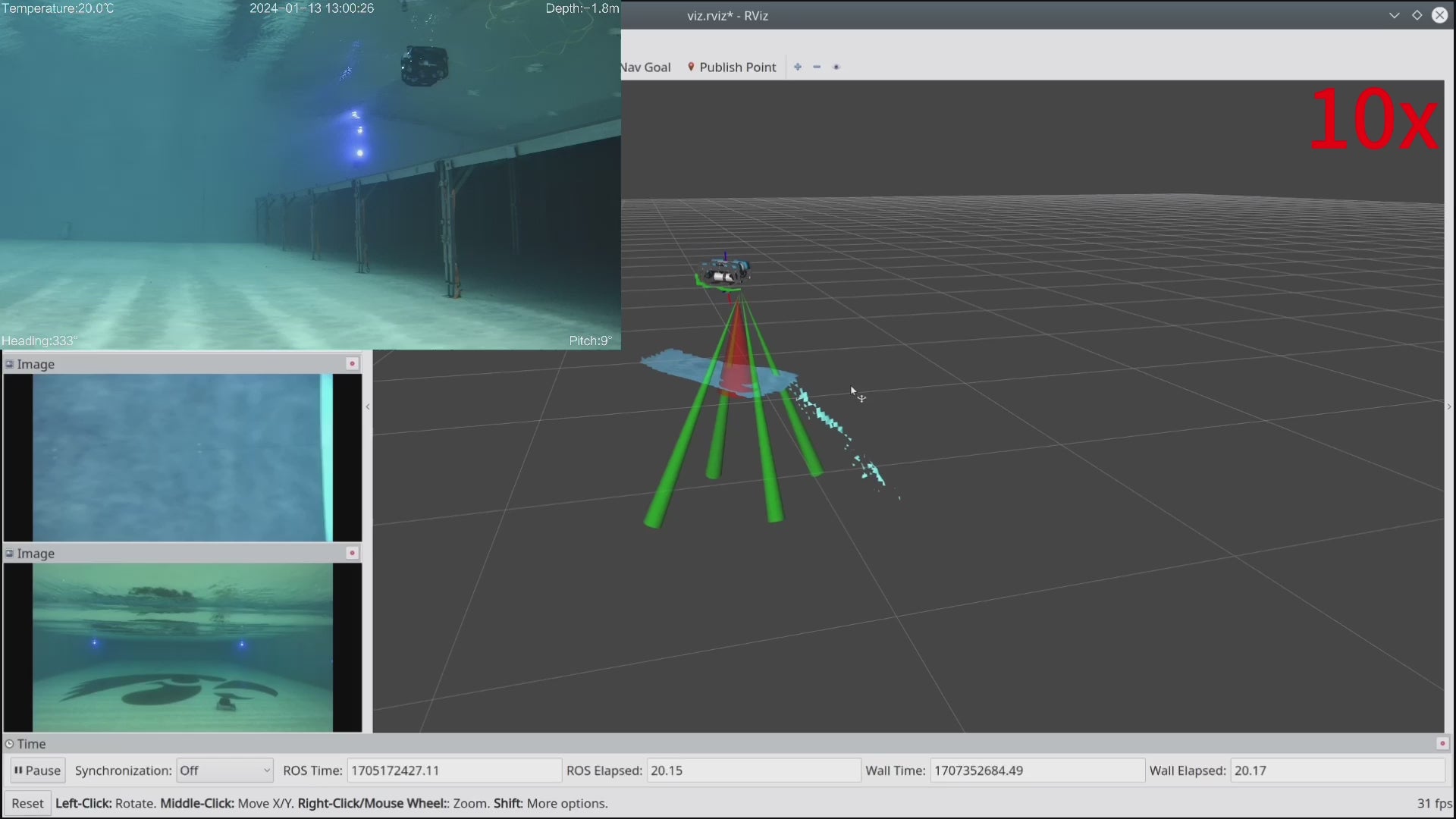
3D Mapping & Modeling Solutions
Stereo Imaging & Photogrammetry- Advanced stereo imaging, photogrammetry, and mapping systems—designed for seamless ROV integration and high-resolution spatial data capture.
-

Single & Multi Camera Arrays
Customizable Project Solutions- High-performance single and multi-camera arrays—designed for machine vision, DSLR, surveillance, or cinematic cameras and fully customizable to meet oceanographic research goals.
-

Marine Electronics Enclosures
Watertight Junction Boxes & Enclosures – Depth-rated, corrosion-resistant, impact-resistant housings engineered to protect sensitive marine electronics in demanding underwater environments.
-

Underwater LED, UV, & Infrared Lights
Submersible Lights – Depth-rated, corrosion-resistant lighting systems engineered for underwater use across the infrared (IR), visible, and ultraviolet (UV) spectrum.
-

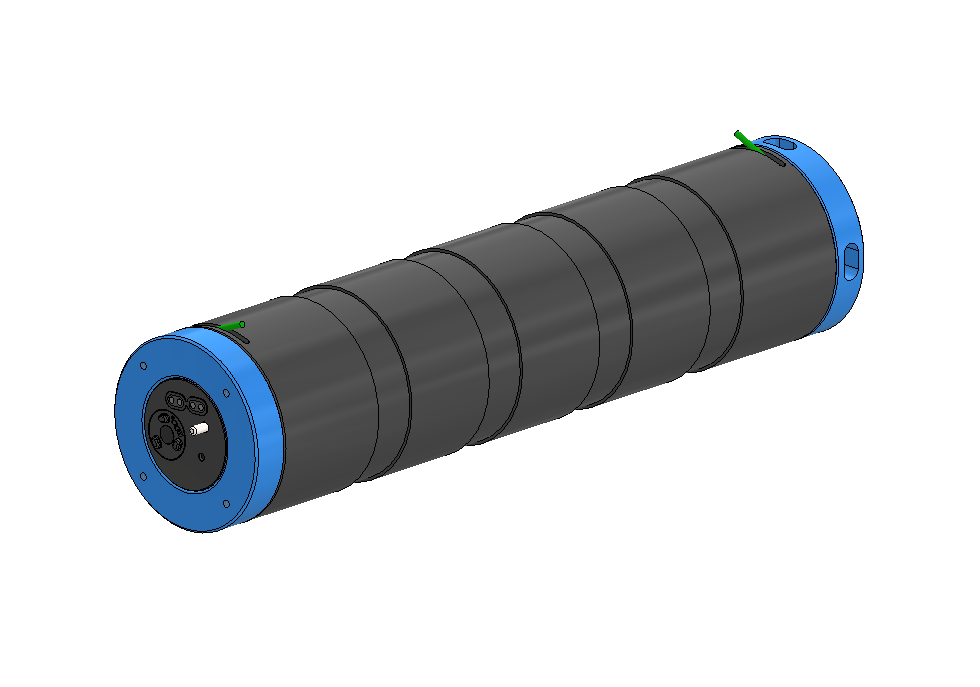
Battery & Power Enclosures
Underwater Battery & Power Cylindrical Enclosures- Underwater battery and power cylindrical enclosures designed for use in demanding marine environments.






Oceanographic Research Products
-

 Vendor:Sexton Products
Vendor:Sexton ProductsMV 30-25
Regular price $2,376.00 USDSale price $2,376.00 USD Regular priceUnit price per -

 Vendor:Sexton Products
Vendor:Sexton ProductsMV 30-25 Titanium
Regular price $8,050.00 USDSale price $8,050.00 USD Regular priceUnit price per -

 Vendor:Sexton Products
Vendor:Sexton ProductsMV 40-25
Regular price From $2,575.00 USDSale price From $2,575.00 USD Regular priceUnit price per -

 Vendor:Sexton Products
Vendor:Sexton ProductsNon-Reactive 40-25
Regular price $2,436.00 USDSale price $2,436.00 USD Regular priceUnit price per -

 Vendor:Sexton Products
Vendor:Sexton ProductsPressure Activated LED Lights
Regular price $2,500.00 USDSale price $2,500.00 USD Regular priceUnit price per -

 Vendor:Sexton Products
Vendor:Sexton ProductsSony A-1 Photogrammetry Housing
Regular price $8,980.00 USDSale price $8,980.00 USD Regular priceUnit price per -

 Vendor:Sexton Products
Vendor:Sexton ProductsSeahorse Cam: Rugged 4K Trawl Fishery Underwater Camera System
Regular price $11,500.00 USDSale price $11,500.00 USD Regular priceUnit price per -

 Vendor:Sexton Products
Vendor:Sexton ProductsZED Head
Regular price $7,525.00 USDSale price $7,525.00 USD Regular priceUnit price per -

 Vendor:Sexton Products
Vendor:Sexton ProductsRugged Trawl
Regular price $18,000.00 USDSale price $18,000.00 USD Regular priceUnit price per -

 Vendor:Sexton Products
Vendor:Sexton ProductsMobius Trawl
Regular price $9,500.00 USDSale price $9,500.00 USD Regular priceUnit price per -
 Vendor:Sexton Products
Vendor:Sexton ProductsMission Housing
Regular price $2,892.00 USDSale price $2,892.00 USD Regular priceUnit price per -

 Vendor:Sexton Products
Vendor:Sexton ProductsGulf 360 - SphereCam Housing
Regular price $21,450.00 USDSale price $21,450.00 USD Regular priceUnit price per -
 Vendor:Sexton Products
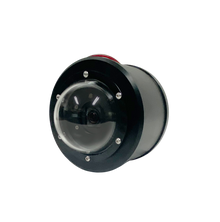
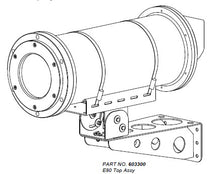
Vendor:Sexton ProductsE-80 Extreme Temperature Housing
Regular price $4,198.00 USDSale price $4,198.00 USD Regular priceUnit price per -
 Vendor:Sexton Products
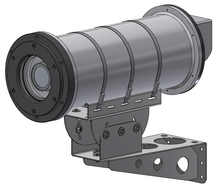
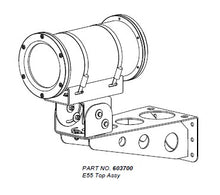
Vendor:Sexton ProductsE-55 Extreme Temperature Housing
Regular price $3,601.00 USDSale price $3,601.00 USD Regular priceUnit price per -
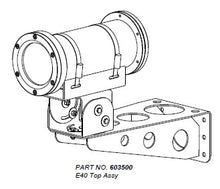
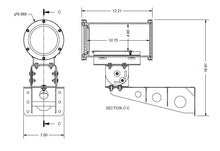
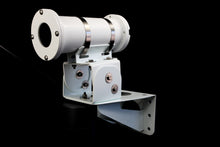
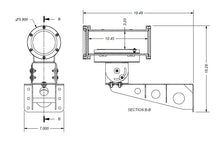 Vendor:Sexton Products
Vendor:Sexton ProductsE-40 Extreme Temperature Housings
Regular price $3,225.00 USDSale price $3,225.00 USD Regular priceUnit price per -
 Vendor:Sexton Products
Vendor:Sexton ProductsE28 Rugged Surveillance Enclosure
Regular price $2,776.00 USDSale price $2,776.00 USD Regular priceUnit price per -

 Vendor:Sexton Products
Vendor:Sexton ProductsDeep Marine PC
Regular price $6,000.00 USDSale price $6,000.00 USD Regular priceUnit price per


































Amin, R., Richards, B. L., Misa, W. F. X. E., Taylor, J. C., Miller, D. R., Rollo, A. K., Demarke, C., Singh, H., Young, G. C., Childress, J., Ossolinski, J. E., Reardon, R. T., & Koyanagi, K. H. (2017). The Modular Optical Underwater Survey System. Sensors, 17(10), 2309. https://doi.org/10.3390/s17102309
Pickett, M. S., Kolano, H., Davidson, J. R., & Marburg, A. Design of a Robotic Testbed for Underwater Manipulation Research.
J. Burnett, F. Rack, B. Zook and B. Schmidt, "Development of a borehole deployable remotely operated vehicle for investigation of sub-ice aquatic environments," OCEANS 2015 - MTS/IEEE Washington, Washington, DC, USA, 2015, pp. 1-7
David R. Bryan, Noëlle Yochum, Katherine C. Wilson, Evaluating Pacific salmon swimming behavior in the aft end of a pelagic trawl to inform bycatch reduction device design and use, Marine and Coastal Fisheries, Volume 16, Issue 4, August 2024, 10306, https://doi.org/10.1002/mcf2.10306
Egan, G., Cowherd, M., Fringer, O., & Monismith, S. (2019). Observations of near-bed shear stress in a shallow, wave- and current-driven flow. Journal of Geophysical Research: Oceans, 124, 6323–6344. https://doi.org/10.1029/2019JC015165
Lydia M. Mäthger, Michael J. Bok, Jan Liebich, Lucia Sicius, Dan-Eric Nilsson; Pupil dilation and constriction in the skate Leucoraja erinacea in a simulated natural light field. J Exp Biol 15 February 2022; 225 (4): jeb243221. doi: https://doi.org/10.1242/jeb.243221